







DJI PHANTOM 4 RTK

El Phantom 4 RTK ha sido diseñado teniendo en cuenta los requisitos del mercado de topografía y mapeo desde sistemas aéreos no tripulados brindando una solución de avión no tripulado compacta con una cámara de alta resolución y la capacidad de capturar datos RTK con precisión de centímetros.
El dron para topografía
DJI ha replanteado su tecnología de drones desde el principio, revolucionando sus sistemas para lograr un nuevo estándar para la precisión de los drones: el resultado de la creación del Phantom 4 RTK.

El Phantom 4 RTK ha sido diseñado teniendo en cuenta los requisitos del mercado de topografía y mapeo desde sistemas aéreos no tripulados brindando una solución de avión no tripulado compacta con una cámara de alta resolución y la capacidad de capturar datos RTK con precisión de centímetros.
- Sistema de posicionamiento de nivel centimétrico
- OcuSync
- Sistema de imagen precisa
- TimeSync
- D-RTK 2 Compatibilidad con la estación móvil
- Compatibilidad NTRIP
- Mobile SDK Compatible

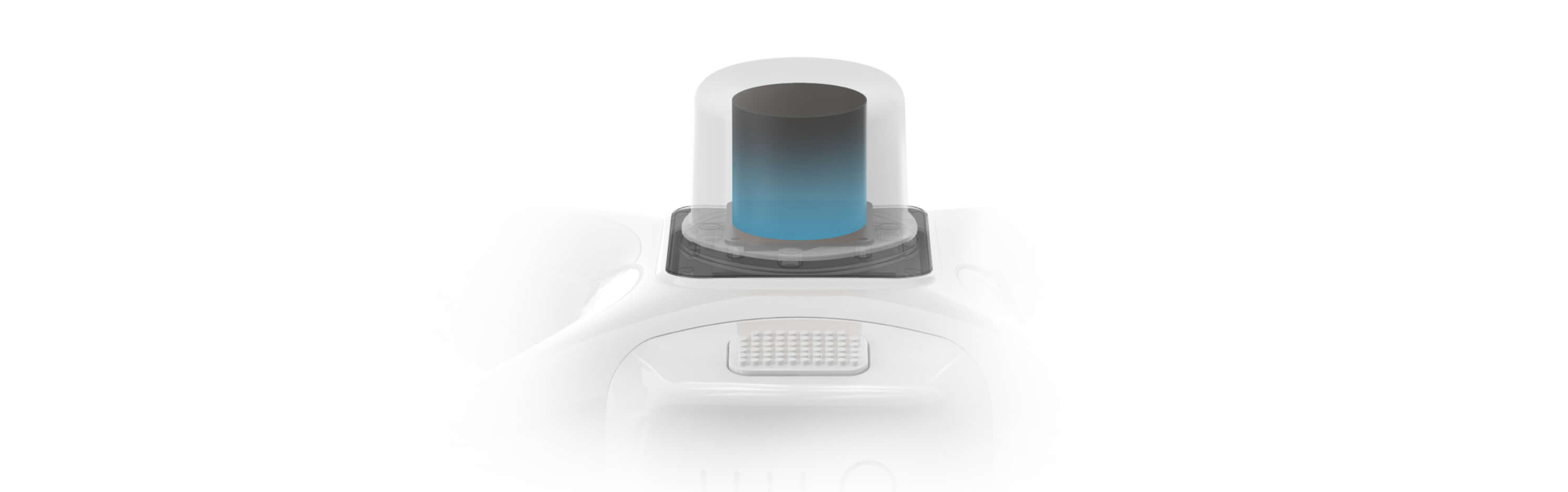
Posicionamiento con una precisión centimétrica. Módulo RTK integrado.
El Phantom 4 RTK incluye un módulo RTK completamente integrado que proporciona información de posición a nivel centimétrico en tiempo real, para obtener una precisión absoluta en la metainformación de la imagen. Justo al lado del receptor RTK se encuentra un módulo GNSS redundante gracias al que es posible mantener la estabilidad del vuelo en lugares con mala recepción de señal, como ciudades densamente pobladas. La combinación de estos dos módulos permite al Phantom 4 RTK optimizar la seguridad del vuelo y, a la vez, garantizar que se consigue una información lo más precisa posible para complejas tareas de prospección, cartografía e inspección.
El Phantom 4 RTK se adapta a cualquier flujo de trabajo. Puede conectar su sistema de posicionamiento a la estación móvil D-RTK 2, a NTRIP (Network Transport of RTCM via Internet Protocol) mediante un accesorio 4G o una red local Wi-Fi, o almacenar la información de satélite para utilizarla en PPK (Posprocesado cinemático).
Consigue datos precisos gracias a TimeSync
El nuevo sistema TimeSync ha sido creado para sincronizar continuamente el controlador de vuelo, la cámara y el módulo RTK, para aprovechar así los módulos de posicionamientodel Phantom 4 RTK al máximo. Además, TimeSync garantiza que todas las fotos utilizarán las metainformación más precisa y fija los datos de posicionamiento al centrodel CMOS - optimizando los resultados de los métodos fotogramétricos y permitiendo que la imagen consiga un nivel de precisión centimétrico.

Sistema de imagen preciso
Captura la mejor imagen con un sensor CMOS de 1 pulgada y 20 megapíxeles. Gracias a su obturador mecánico elPhantom 4 RTK puede moverse y capturar imágenessin que aparezca distorsión del obturador, por lo que tanto las misiones de cartografía como la captura corriente de datos pueden realizarse de forma fluida. Al tener una alta resolución, el Phantom 4 RTKpuede lograr un tamaño del píxel del suelo (GSD, por sus siglas en inglés) de 2.74 cm a 100 m de altitud.Para que el Phantom 4 RTK puede ofrecer una precisión sin comparación, todos los objetivos pasan por un riguroso proceso de calibraciónen el que se miden las distorsiones radiales y tangenciales del objetivo. Estas medidas se almacenan en la metainformación de cada imagen para que el software de posprocesado pueda realizar ajustes personalizados para cada usuario.

Diseñado para topógrafos
El DJI Phantom 4 RTK ofrece varios modos de control y tecnologías complementarias con las
que se pueden conseguir resultados profesionales para topografía con más eficiencia que nunca antes.



- Producto
- 1.¿En qué se diferencia el Phantom 4 RTK de los anteriores productos de la serie Phantom?
Mientras que los modelos previos de la serie Phantom 4 estaban dirigidos a fotógrafos profesionales y aficionados, el Phantom 4 RTK está dirigido a usuarios de empresa que realicen tareas de cartografía de alta precisión y de recogida de datos similares. El Phantom 4 RTK tiene una forma y un tamaño similares. A ellos añade u un módulo de posicionamiento RTK, el nuevo sistema TimeSync y una aplicación de cartografiado, entre otras cosas.
- 2.¿Qué hélices puede utilizar el Phantom 4 RTK?
El Phantom 4 RTK utiliza las mismas hélices de liberación rápida 9450s que el Phantom 4 Pro.
- 3.¿Puedo volar el Phantom 4 RTK en otros países o regiones?
No, el Phantom 4 RTK tiene versiones específicas para cada país y/o región. Los usuarios pueden consultar el código de su versión en el embalaje del producto o en la aplicación GS RTK (ve a Aircraft Information - Firmware).
- Cámara
- 1.¿En qué se diferencian la cámara del Phantom 4 RTK y la de los Phantom 4 Advanced/Pro?
Mientras que el Phantom 4 RTK y el Phantom 4 Pro/Advanced comparten el mismo sensor CMOS de una pulgada y 20 megapíxeles, la cámara del Phantom 4 RTK ha pasado por un proceso de medición y grabación de la distorsión del objetivo para poder ser utilizada en labores cartográficas. Todas las cámaras del Phantom 4 RTK pasan por un proceso de calibración en el que se mide la distorsión del objetivo y se graba en parámetros OPEN-CV. La cámara permite a los usuarios realizar imágenes sin corrección de la distorsión, junto con los parámetros de distorsión en OPEN-CV en un archivo XMP para su posprocesado.
- 2.¿Se pueden utilizar los filtros ND del Phantom 4 Pro con el Phantom 4 RTK?
Sí, los filtros ND del Phantom 4 Pro se pueden utilizar para el Phantom 4 RTK.
- 3.¿Puede el procesador digital de señales de la cámara del Phantom 4 RTK corregir distorsiones?
No, puedes activar la corrección de distorsión en la cámara, pero las imágenes serán menos precisas que las que se pueden obtener eliminando la distorsión en posprocesado.
- 4.¿Cómo está calibrada la cámara del Phantom 4 RTK?
Todas las cámaras del Phantom 4 RTK pasan por un proceso de calibración en el que se mide la distorsión del objetivo y se graba en parámetros XMP DewarpData. Cuando la “corrección de distorsiones” está desactivada, la imagen original se guardará con las distorsiones. Cuando la “corrección de distorsiones” está activada, ésta se elimina utilizando los parámetros de fábrica, no los calibrados. La corrección de distorsiones no se realiza píxel por píxel.
- Control remoto
- 1.¿Cuáles son las características destacadas del control remoto estándar del Phantom 4 RTK?
1.Pantalla de 5.5 pulgadas integrada, 1080p, hasta 1000 cd/m² Puedes ver la pantalla bajo la luz del sol directa. El control remoto puede funcionar a bajas temperaturas.
2.Compatible con baterías de cambio en caliente.
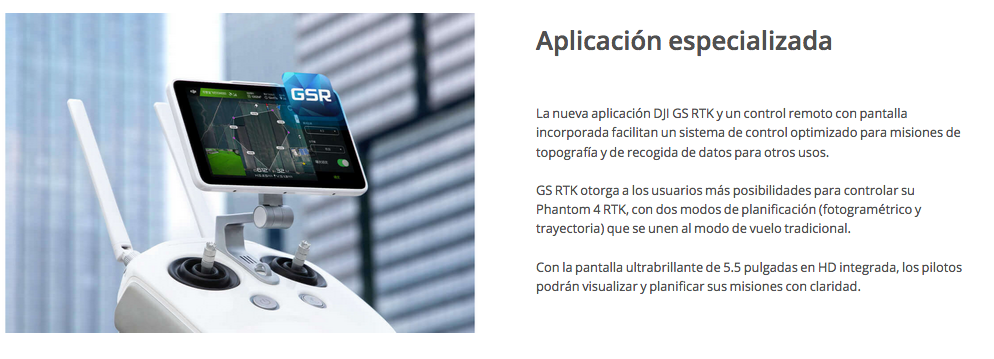
3.La aplicación preinstalada GS RTK puede ejecutar misiones de fotogrametría y trayectoria, entre otras.
4. Transmisión de vídeo OcuSync. - 2.¿Cómo puedo cambiar entre los modos FCC y CE?
No se puede cambiar entre modos FCC y CE.
- 3.¿Puedo conectar el Phantom 4 RTK a otros controles remotos de la serie Phantom?
No.
- Transmisión de vídeo
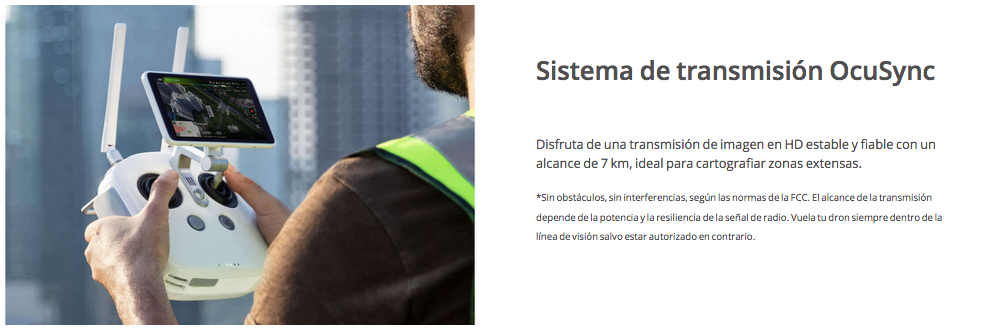
- 1.¿Cuál es el alcance de la transmisión de vídeo del Phantom 4 RTK?
El alcance efectivo de transmisión de vídeo depende de tu configuración de trabajo (por ejemplo, de la posición de la antena) y del entorno de vuelo. En una zona abierta y sin obstáculos, el alcance máximo es de 7 km siguiendo las normas de la FCC y de 5 km siguiendo las normas de la CE. (2.4 GHz).
- 2.¿Qué tengo que hacer si la app me manda la siguiente notificación: “the remote controller signal is weak, please adjust the antenna”?
Esto quiere decir que una incorrecta colocación de la antena afectará a la transmisión de vídeo y a la calidad de la vista en tiempo real. Puedes ajustar las antenas para que el lado plano de la antena mire hacia el Phantom 4 RTK.
- 3.¿Puedo continuar mi tarea de cartografía automatizada si el Phantom 4 RTK pierde la señal de vídeo durante la tarea?
Sí, si se pierde la señal de vídeo puedes volver a conectarte y reanudar la tarea.
- Batería
- 1.¿Puedo utilizar las baterías de mi Phantom 4 Pro con el Phantom 4 RTK y viceversa?
Sí, el Phantom 4 RTK y el Phantom 4 Pro tienen baterías compatibles, con la misma capacidad. Esto quiere decir que el tiempo de vuelo no se verá afectado.
- 2.¿Cuánto tarda en cargarse totalmente una batería del Phantom 4 RTK?
Hacen falta unos 60 minutos para cargar por completo la batería del Phantom 4 RTK.
- 3.¿Cómo debo mantener y almacenar las baterías?
Las baterías deben guardarse en un lugar seco, fresco y bien ventilado, lejos de posibles fuegos, altas temperaturas o materiales inflamables. No pongas la batería en un entorno que pueda causar que la temperatura de la batería se eleve, como bajo luz solar directa o dentro de un coche expuesto al sol. Para almacenarlas a largo plazo, asegúrate de que el nivel de carga sea superior al 50%, pero no estén completamente cargadas. La batería debería cargarse y descargarse cada tres meses para mantenerla activa si se almacena durante mucho tiempo.
- 4.¿Qué quiere decir que el icono de la batería se vuelva amarillo en la aplicación?
Quiere decir que a la batería le queda poca carga. Por favor, ten cuidado al volar en esta situación.
- 5.¿Puedo utilizar las baterías del Phantom 4 RTK a bajas temperaturas?
La capacidad de la batería y, por tanto, su tiempo de vuelo descenderán dramáticamente a bajas temperaturas (< -10ºC/14ºF). Se recomienda que calientes las baterías hasta los 20 ºC/68ºF antes de despegar para aminorar este efecto. Para garantizar la seguridad del vuelo, no se puede cargar la batería si la temperatura es menor de 5 ºC/41ºF o superior a 40 ºC/ 104 ºF.
- 6.¿Por qué se empiezan a calentar las baterías tras haber sido almacenadas mucho tiempo?
Ese fenómeno es normal. Cuando las baterías se almacenan durante mucho tiempo con más del 65% de carga restante, se iniciará un proceso de descarga automática para reducir la batería al 65%. Esto hará que la batería se caliente.
- Posición y orientación
- 1.¿Qué opciones tengo para referenciar los datos de posicionamiento del Phantom 4 RTK?
1. Conéctate a través de OcuSync a tu Estación Móvil D-RTK 2. (RTCM3.2)
2. Conéctate de forma remota a una red RTK personalizada con un accesorio 4G usando una cuenta NTRIP. (RTCM3.2)
3. Conéctate de forma por Wi-Fi a una red RTK personalizada con una cuenta NTRIP. No disponible en Europa. (RTCM3.0/RTCM3.1/RTCM3.2) - 2.¿Qué precisión de posicionamiento puede alcanzar el Phantom 4 RTK?
El Phantom 4 RTK puede capturar datos con una precisión de 1 cm + 1 ppm (horizontal) y 1.5 cm + 1 ppm (vertical).
- 3.¿Qué es TimeSync y cómo puede garantizar la precisión del posicionamiento de cada imagen hecha con el Phantom 4 RTK?
TimeSync sincroniza continuamente al controlador de vuelo, la cámara y el módulo RTK, y ajusta los datos de posicionamiento al centro del CMOS, guardando los datos en formato EXIF y XMP.
- 4.¿En qué se diferencian los modos PPK y RTK? ¿Cómo se usan?
RTK y PPK son dos tecnologías cinemáticas diferentes y referencian los datos de formas diferentes. Aunque PPK tiene por norma general una precisión ligeramente superior a RTK, ambos llegan a un nivel de precisión centimétrico. Se recomienda utilizar RTK a usuarios que vayan a volar en entornos con conexión en tiempo real a través de OcuSync o 4G y que prefieran la practicidad y eficiencia. Para usuarios que dispongan de suficiente tiempo y a los que nos les importe operar sin conexión, PPK es una mejor opción.
- 5.¿Con qué tipos de archivo PPK es compatible el Phantom 4 RTK? ¿Para qué sirven estos archivos y cómo los uso?
EVENTLOG.bin es un formato binario que guarda la exposición, la marca temporal y el archivo log.
PPKRAQ.bin es un formato RTCM3.2 MSM5 que guarda los datos de observación por satélite y los datos de efeméride.
Rinex.obs es un formato Rinex que se crea durante la transcodificación.
Timestamps.MRK es un formato ASCII que guarda la exposición y la marca temporal.
*DJI no suministra software PPK. - 6.¿Cómo encuentro la información XMP en las fotos hechas con mi Phantom 4 RTK?
Abre la foto en formato de texto y busca “XMP” para encontrar esta información en cada foto.
- 7.Cuando saco una foto con el Phantom 4 RTK, ¿cuál es el punto de referencia de la información de posicionamiento?
Gracias al nuevo sistema TimeSync, cada foto almacena la posición del centro del CMOS en los metadatos.
- 8.¿Dónde puedo encontrar el valor de compensación entre el centro de fase de la antena y el centro del sensor CMOS?
Para cada foto el nivel de compensación entre el centro de fase de la antena del módulo RTK y el sensor CMOS se guarda en la marca temporal en el sistema de coordenadas NED. Se hace en un archivo MRK guardado en la carpeta “survey”.
- Software
- 1.¿Cómo puedo actualizar el firmware del Phantom 4 RTK?
Actualizar el firmware del Phantom 4 RTK es similar a la actualización del firmware del Phantom 4 Pro. Puedes actualizar el firmware del control remoto y de la aeronave por separado utilizando el DJI Assistant 2.
También puedes actualizar ambos firmwares al mismo tiempo utilizando la aplicación GS RTK. Primero tienes que conectar el control remoto a la aeronave con cables OTG y USB. Luego sigue las instrucciones de la aplicación GS RTK del control remoto. - 2.¿En qué situaciones se activan los sensores infrarrojos laterales?
En estos momentos los sensores infrarrojos no están activas, vuela con precaución.
- 3.¿Qué aplicaciones pueden utilizarse para cartografía o inspección?
Los usuarios pueden utilizar la aplicación preinstalada GS RTK para cartografía e inspección. Además, los usuarios pueden instalar aplicaciones hechas con el SDK Móvil de DJI.
- 4.¿Cambia la lógica de la función de regreso al punto de origen del Phantom 4 RTK con respecto a la del Phantom 4 Pro?
No. La lógica del regreso al punto de origen es prácticamente la misma en ambas aeronaves.
- 5.¿Qué plataforma de cartografía se utiliza como fuente de los datos cartográficos de la aplicación Phantom 4 RTK?
Mapbox suministra datos cartográficos a la aplicación GS RTK.
- 6.¿Hay alguna limitación respecto a los puntos de referencia del Phantom 4 RTK?
No hay límites al utilizar la aplicación GS RTK.
- 7.¿Puedo establecer puntos de referencia escribiendo los valores de longitud y latitud en el modo Trayectoria?
No.
- 8.La aplicación GS RTK, ¿tiene funciones de planificación del vuelo en 3D?
No.
- 9.¿Al importar ficheros de área KML con la aplicación GS RTK, cuál es el máximo número de puntos de perímetro que puedo establecer?
En estos momentos GS RTK permite fijar hasta 99 puntos de perímetro con ficheros KML.
- Cartografía
- 1.¿Qué formatos admite el Phantom 4 RTK para los datos diferenciales?
En estos momentos el Phantom 4 RTK es compatible con datos RTCM 3.0, RTCM 3.1, MSM4, MSM5, MSM6 y MSM7 bajo RTCM3.2.
- 2.Las coordenadas que recoge el Phantom 4 RTK, ¿son relativas o absolutas?
Las coordenadas que recoge el Phantom 4 RTK son coordenadas aboslutas en WGS84.
- 3.¿Cómo puedo calcular la altitud de vuelo apropiada en función de un cierto tamaño de pixel del suelo?
Puedes utilizar la ecuación H = 39 × GSD para estimar la altitud de vuelo apropiada. Por favor ten en cuanta que el tamaño del pixel del suelo (GSD, por sus siglas en inglés) en esta ecuación está medido en centímetros, mientras que la altitud de vuelo (H en la ecuación) está medida en metros. Por ejemplo, el GSD es de 2.74 cm a una altitud de 100 m.
- 4.¿Se almacena alguna información relativa a la altitud en las fotos hechas con el Phantom 4 RTK? En caso afirmativo, ¿cómo se almacenan?
El Phantom 4 RTK recoge la altitud respecto al nivel del mar y la altitud relativa a tu punto de despegue. La altitud respecto al nivel del mar se puede usar para la cartografía, mientras que la altitud relativa puede encontrarse en el archivo XMP.
- 5.¿Cómo puedo capturar fotografía oblicua con el Phantom 4 RTK?
Las imágenes oblícuas pueden capturarse volando en modo fotogramétrico en la aplicación GS RTK. En modo fotogramétrico, puedes ajustar el ángulo del estabilizador de -90º a -45º bajo Camera Settings según tu plan de vuelo. Solo puedes establecer un ángulo de estabilizador al mismo tiempo, así que si deseas capturar el mismo lugar desde varios ángulos tendrás que planificar la misma misión con diferentes ángulos de cámera.
- 6.¿Puedo crear un modelo o una nube de puntos 3D con software de terceros con las fotos tomadas con el Phantom 4 RTK? En caso afirmativo, ¿qué precisión tiene el modelo creado?
Sí, puedes utilizar software de terceros para procesar los datos de imagen del Phantom 4 RTK y crear modelos. Sin embargo, la precisión variará en función del algoritmo fotogramétrico utilizado. Por favor, consulta al proveedor de software para más información respecto a la precisión a esperar.
- 7.¿Qué precisión tienen los modelos generados por el Phantom 4 RTK cuando no se establece ningún punto de control de tierra (GCP)? ¿Se cumplen los requisitos de precisión para realizar triangulación aérea a escala 1:500?
Las ortoimágenes creadas con las imágenes capturadas por el Phantom 4 RTK con un software de reconstrucción específico han mostrado una precisión absoluta de aproximadamente 5 cm, cuando la precisión requerida para la triangulación aérea a escala 1:500 es menor de 30 cm. Esto quiere decir que la precisión del Phantom 4 RTK cumple los requisitos para realizar mapas aéreos a escala 1:500.
- 8.¿Es el Phantom 4 RTK compatible con estaciones base de terceros?
No, no puedes conectar estaciones base de terceros al Phantom 4 RTK o al control remoto a través de una estación de radio. Sin embargo, puedes obtener los datos de un servidor RTK en una red Wi-Fi o 4G con el protocolo NTRIP. Los usuarios pueden almacenar en la aeronave datos de satélite para realizar posprocesado cinemático (PPK) para completar sus tareas.
![]()
¿Qué necesito para volar drones legalmente?
![]()
Desde el 31 de diciembre de 2020 se aplica la normativa europea de UAS (drones). Esta norma afecta a todos los drones independientemente de su tamaño, peso o uso. En este apartado se recopilan las obligaciones mínimas a cumplir antes de volar cualquier drone
![]()
Reglas de vuelo
El vuelo de drones está sujeto a reglas generales de operación condicionadas, entre otros, por el
peso del drone,
la presencia de personas
y la proximidad a edificios.
Puedes consultar las distintas categorías operacionales en la guía de “operaciones con UAS/drones”.
![]()
Registro como operador
Todos los usuarios que pretendan volar un drone* deberán registrarse como operadores en la sede electrónica de AESA y obtener el número de operador según la normativa europea (apartado de registro de operador de UAS) . Una vez obtenido el número de operador este debe incluirse en el dron de forma visible.
Formarse como piloto
Para volar un dron debes tener un mínimo de formación acreditable en función de la categoría operacional en la que se opere. La formación y examen de conocimientos para poder operar un dron en categoría abierta, subcategorías A1 y A3, es accesible a través de la web de AESA (apartado de formación de pilotos UAS). Puedes realizar con Escuela de Drones tanto esta formación como las otras que puedas necesitar en función del equipo y la situación en la que vayas a operar.
Disponibilidad de seguro de responsabilidad civil
Se debe tener contratada una póliza de seguro que cubra la responsabilidad civil frente a terceros por daños que puedan surgir durante y por causa de la ejecución de cada vuelo que se realice. Más información en materia de seguros en el apartado de Normativa de UAS/drones.
![]()
Lugar del vuelo
Además de las reglas generales de operación de drones, existen limitaciones al vuelo de drones en ciertos lugares motivadas por diferentes razones: cercanía de aeródromos, zonas militares, protección de infraestructuras críticas, protección medioambiental, etc. Consulta el apartado “Zonas geográficas de UAS” para conocer los requisitos de vuelo en las distintas zonas de España.
Sistema de identificación a distancia directa ("DRI")
Aquellos operadores que deseen volar con UAS/drones en categoría abierta (A1, A2 y A3) que dispongan de marcado de clase (C1, C2 y C3) así como aquellos que deseen operar en categoría específica (bajo escenario estándar nacional y europeo o bajo autorización), deberán estar equipados con un sistema de identificación a distancia directa ("DRI"). En relación con este requisito, los UAS/drones deberán disponer de un número de serie único según la norma ANSI/CTA-2063-A-2019. Consulta el apartado "Diseño y producción de UAS/drones" para más información.
![]()
Registro de las aeronaves en el Ministerio del Interior
Aquellas aeronaves no tripuladas con una MTOM de 250 g o más o que estén equipadas con un sensor capaz de capturar datos personales deberán inscribirse en el Ministerio del Interior de forma que se permita vincular los datos de la aeronave con el propietario del UAS. Igualmente se deberá realizar una comunicación al Ministerio del Interior siempre y cuando se produzca una compra, transmisión de propiedad, pérdida o inhabilidad para operar el UAS.
Edad mínima de los pilotos
La edad mínima de los pilotos a distancia será de dieciséis años, aplicándose excepciones en la categoría «abierta», donde se podrá reducir la edad mínima dependiendo de la clase de UAS con el que se desee operar. Consulta el aparado “Operaciones con UAS/Drones - Categoría abierta” para más información.
* Salvo las excepciones que se indican en el apartado "operaciones categoría abierta" o si te han contratado como piloto a distancia o vuelas para otra persona, en cuyo caso quien debe registrarse es la organización operadora del dron.

Desde Drone Prix S.L ponemos a tu disposición cursos de todos los niveles de 0 a 3. Modulares de cada nivel o acumulativos de niveles 1 y 2, 2 y 3 o nuestro curso integral de todos los niveles 1, 2 Y 3.
Para los niveles en los que no se exige práctica de vuelo, tenemos disponibles sesiones de entremiento práctico con instructores profesionales.
En todos nuestros cursos de Piloto de UAS, te acompañamos para darte los conocimientos necesarios y te ayudamos en el proceso para registrarte como Piloto de UAS en AESA.
feedback Reportar comentario